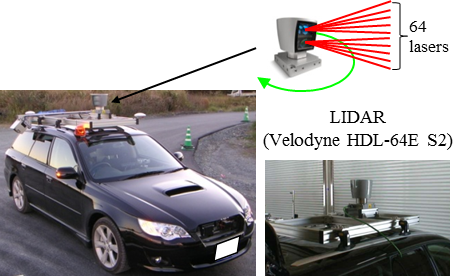
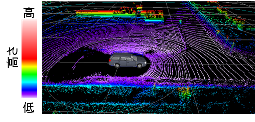
本研究では,車両周辺全方位の環境認識が可能なセンサを用いた障害物検出を行なっています. センサは車両上部に取り付けられており,センサ自体が回転することにより高精細な3次元の点群データが得られます.
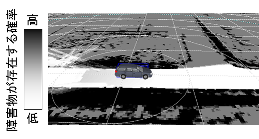
このデータを解析することにより,障害物マップを生成し,自動運転でのパスプランニング(経路生成)に用いています.
|
MENU
|
環境認識
レーザレンジファインダによる全方位環境認識
|
||||||||||