
・レーザレンジファインダによる全方位環境認識
・ステレオビジョンによる車両前方認識
・ミリ波レーダ及びレーザレンジファインダによる車両前方環境認識
|
研究内容紹介
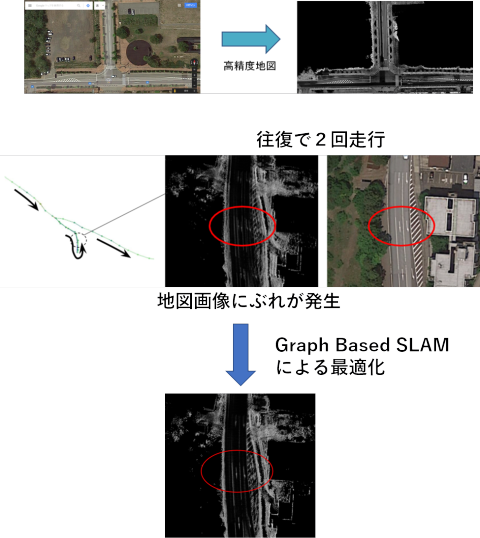
自動運転のための必要技術には、デジタル地図生成、自己位置推定、周辺環境認識、走行軌道生成・車両制御、ヒューマンマシンインタフェースなどが挙げられ、これらを統合して自動運転システムを形成しています。私たちの研究室では、これらの要素技術を幅広く研究し、自律型自動運転自動車のシステム開発を行っています。 デジタル地図生成カーナビ等に用いられているGPSによる車両位置推定では、ビル街やトンネル内などの電波が取得しにくい場所での精度が低下してしまいます。そこで、私たちの研究室では、GPSとLiDARを用いて作成した高精度な地図を用意し、車両位置の推定や周辺環境認識に役立てています。地図データ収集のための走行時に一度通ったエリアを再度通過したとき、GPSの精度の問題から地図がずれて重なってしまうことがあります。こういった白線などのずれは後の自己位置推定における精度を落とす要因となるため、Graph Based SLAMにより地図全体の最適化を行っています。
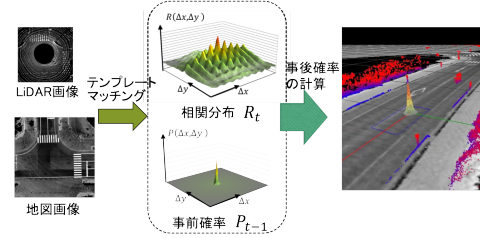
自己位置推定自己位置推定は、センサからリアルタイムに得られる情報と地図を照合し車両の位置を求める技術です。自動運転において、車両位置の推定が走行軌道の決定や制御に関わるため、安全性を確保するためには高精度な自己位置推定技術が必要となります。私たちの研究室では、地図生成技術により作成された高精度地図とLiDARを用いてマッチングを行い、車両が地図上のどの位置にいるのかを計算しています。
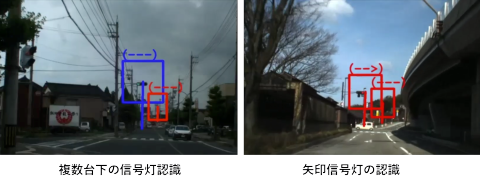
周辺環境認識周辺環境認識では、信号認識技術や、他の車両や歩行者、障害物などの物体を検知、識別し、その動きを予測する技術が含まれます。私たちは、カメラによる信号認識や、全方位LiDARによる物体認識の技術を開発しています。・カメラによる信号認識 自動運転を行う上で、信号機の認識は非常に重要です。私たちは、信号灯火色・矢印の信号の認識精度向上のための研究に取り組んでいます。カメラ画像とデジタル地図を組み合わせ、地図上の信号機の位置からカメラ画像上の領域を絞り込むことで誤検出を抑制する手法を開発しています。
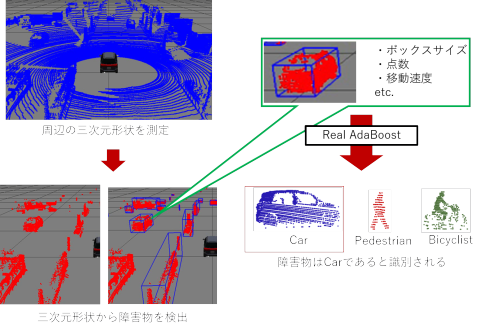
・全方位LiDARによる物体認識 全方位LiDARは赤外線レーザ計測により周囲360°の三次元形状を点の集まり(3D点群)として取得することができます。この3D点群の形状から障害物を検出し、それらの物体が何であるかを識別するために機械学習を使用して物体種別を識別しています。
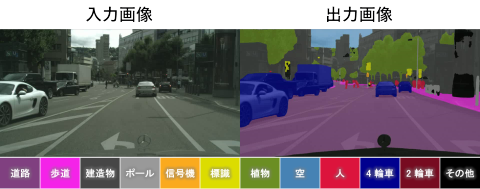
・Semantic Segmentationを用いた走行環境認識 私たちは、単眼カメラから取得した画像に、画像認識、音声認識や最適化問題の解決など様々な分野で注目されている機械学習の中の1つであるDeep Learningを用いることで、自車両周辺の障害物を認識する走行環境認識の研究を行っています。
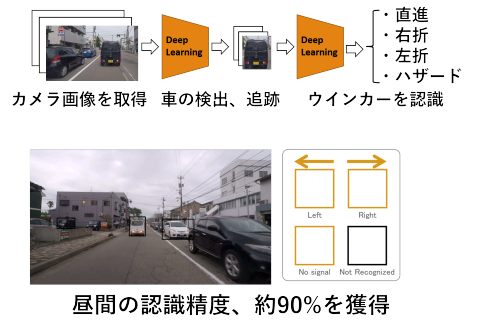
・ウインカーの認識 他の車両のウインカーを認識することで、車両の行動予測をより正確に行うことができます。そのため、私たちはカメラ画像を使用してウインカー認識を行う研究を行っています。ウインカー認識の課題として、車種ごとにウインカーの位置や形状が異なる点や、太陽光などの外乱が存在する点などが挙げられます。私たちはDeep Learningを使用したウインカーの認識を研究しており、Deep Learningのネットワーク構造や学習方法を工夫することで認識精度や処理速度の改善を図っています。
[その他の過去の研究] 走行軌道生成・車両制御自己位置推定や周辺環境認識の結果を用いて、目的地までのルートや、障害物の回避といった、車両をどのような経路・軌道で動かすかを計算します。また、ここで決められた軌道に追従するように車両の動きの制御を行います。[その他の過去の研究] 過去の研究: 移動ロボットの知能化 |