Plug and Play型自己位置推定システムを提唱,改良やその評価をしています.
さまざまな場所で活躍するロボットですが,活躍のために高精度な自己位置の把握が欠かせないことが少なくありません.高精度な自己位置を求めるためには,高精度なセンサを利用するか,複数のセンサを利用するのが一般的です.
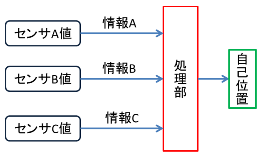
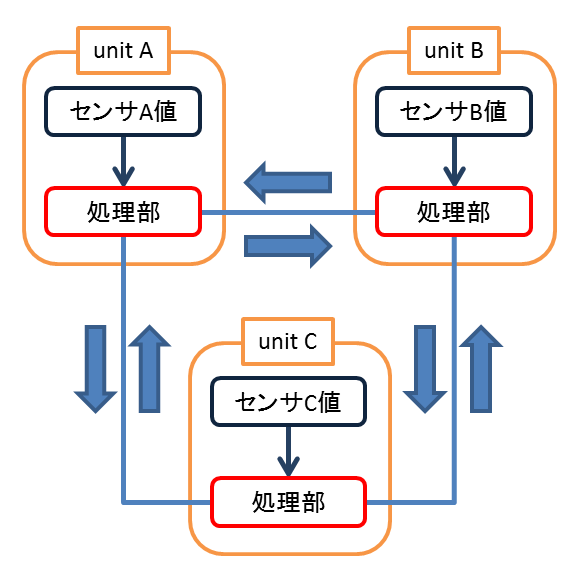
当然ですが,多種類のセンサはそれぞれ扱うものが違います.例えば加速度計なら"加速度"が,ロータリエンコーダからなら"進行量"が求められますが,それらを特定の式に当てはめてやらなければ,"自己位置"は得られません.センサからの値を直接やり取りして"自己位置"を求める方法ではなく,センサ単体からの情報のみから"自己位置"を推定し,各々のセンサが推定した値を等しい次元でやり取りする.そうすることによって分業を進めやすくなり,センサ追加と削除を簡単にするというのがPnP型自己位置推定システムです.
|
MENU
|
センサパラメータ
Plug and Play型自己位置推定システム
|