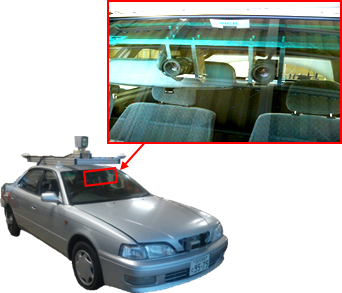
本研究では二つのカメラで構成されたステレオビジョンシステムを車両前方が見えるように実験車両に搭載しており,このシステムを用いて障害物検出や自車両の動きを求め,ドライバーへの安全運転支援を行うシステムを開発している.ステレオビジョンシステムは二つのカメラを利用することで三角測量の原理を用いて,物体までの距離を計測することができるシステムである.このシステムから得られる物体までの距離情報から先行車や対向車,縁石といった障害物などを検出し,それが静止物体か移動物体かの判断も行っている.また,障害物検出を行う際に重要となる自車両の位置や速度,方向といった自車両の動き情報もカメラから見える自車両周辺物体との相対的な位置関係から算出している.
この安全運転支援システムを利用することでドライバーの人為的なミスを防ぎ,交通事故の削減を目的としている.
|
MENU
|
環境認識
ステレオカメラによる車両前方の環境認識
|
||||||